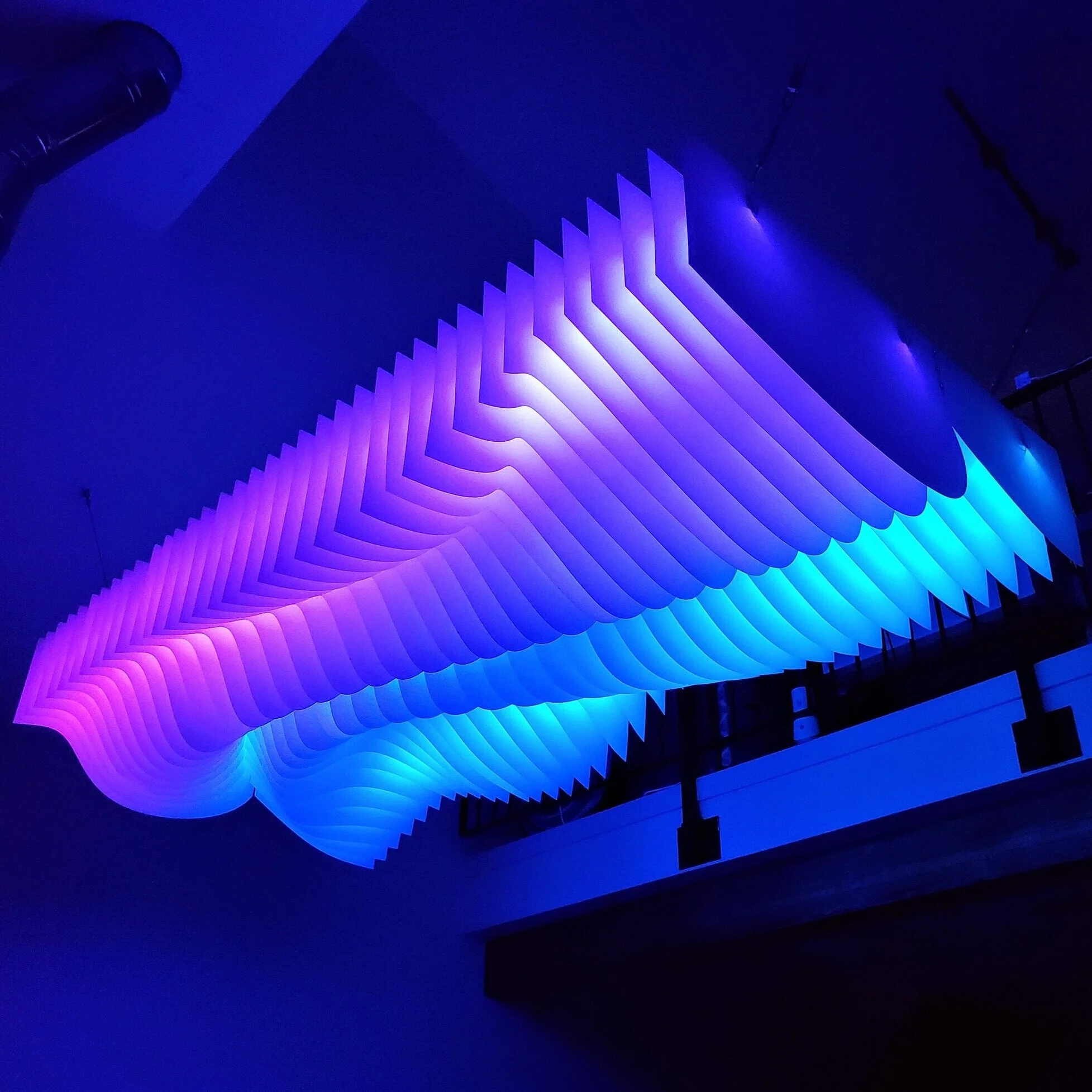
Light[s]well is a custom 4'x8' light installation for a triple-height living room, made voice-responsive by using the Arduino Alexa skill. The structure comprises 80/20 extrusions and fasteners, with LED strips embedded in the channels of the structure. 74 sheets of laser-cut cardstock make up the undulating light-diffusing wave pattern.
30 LEDs per meter strips were used to give each gap in the cardstock 2 LEDs per structural metal beam, for a total of 6 LEDs per gap. The LEDs are individually addressable and are powered by an Arduino MKR1000 (using a logic level shifter) in conjunction with Arduino Create / IoT CLoud.
The design was made in Rhino 7 WIP and Grasshopper.
Samsung Research America held an internal design competition for a bench to be featured at their new Mountain View campus. This design was the result of a one-day design session, and was one of two winning submissions that were recently constructed and placed on site.
The idea behind the bench was to contrast two materials (Stainless steel and teak), which play with each other to create interesting visual effects where the materials intersect. The wood provides a consistent framework for the metal profiles to move through as they change shape. The metal appears very heavy and solid when hidden beneath the surface of the wood, and light and airy when it rises up above the bench's surface to create a backrest for users.
The bench was designed in Rhino and Grasshopper.
This project is an investigation of the translation of real-time motion data into robotic motion paths. Through the implementation of an intuitive interface (which behind the scenes is comprised of: Leap motion + Rhino + Grasshopper + Firefly + Crane) designers can go straight from fluid hand-motions to freeform physical objects. The goal is to circumnavigate mediation of the input by traditional 2D digital interfaces (mouse, keyboard, monitor), and allow for 3D input to translate directly to 3D output.
This project aims to blur the line between processes of design and fabrication in the context of rapid prototyping by increasing the fluidity of the fabrication process through coordinated material and robotic processes. The project exploits feedback loops that allow the process to be used as a live generative form-finding tool as well as a method for reification of designed objects.
By injecting and suspending light-curing resin in a gelatinous medium, one is afforded the ability to shape freeform objects without the need for molds or other subtractive manufacturing processes that would otherwise be necessary. The gel acts as an omnidirectional support material which is reusable, so there is no wasted material.
One major distinction between this project and other rapid prototyping processes is the ability to utilize 3D vector-based toolpaths. Virtually all other processes use paths generated via contouring a digital model, and rely on the hardening of each successive layer before being able to move on to the next.
The suspension of resin in space without added support material allows for the ability to navigate and fabricate directly on and around other existing objects within the Gel, as well as the ability to observe the process from any angle. The suspension of time in this process allows for tool changes, manual injections, on-the-fly robotic injections, multi-material injections, live modification of the digital or physical model, and the ability to physically "undo" (resin removal via suction or scooping).
Special thanks to Peter Testa, Brandon Kruysman, Jonathan Proto, Devyn Weiser, and Kyle and Liz Von Hassln.
SCI-Arc Fall 2012
Testa Vertical ESTm Studio
Instructor: Peter Testa / Brandon Kruysman / Jonathan Proto
AT: Peter Vikar
Project Lead: Brian Harms (nstrmnt.com)
Project Team: Haejun Jung / Vince Huang / Yuying Chen
Featured on:
This project aims to explore the repeatability of the creation of inexact forms through exact machinic operations, with the intention of achieving a certain degree of control over entropic processes. These processes involve the articulated deposition of liquid wax into cool water, taking advantage of the wax’s buoyancy, rapid phase change, and ability to fuse and bond to itself and other materials.
Buoyancy plays a key role in the generation of these complex wax forms. Wax can be deposited such that it rises and pools, creating column structures and datums, or floor plates. By raising or lowering water levels while pools of hot wax float on the water’s surface, organic caves and coves are created within the structural network.
This project also aims to project these processes onto an architectural scale whereby autonomous machines may be deployed on site and organically shape buoyant, hardening liquids through their flotation. Instructions would be encoded and sent to robots, and the operation would be overseen by humans, who could make adjustments and corrections in real time. This idea poses the following questions: What happens when architects, who rely heavily on their ability to reify an anticipated form, embrace inexact processes of construction? What is the role of the drawing when the form cannot be fully anticipated? What new form would
construction documents take? Or would they become antiquated?
Credits:
Brian Harms, Nicholas Barger
instructor: Marcelyn Gow
Sci-arc Spring 2013
This project aims to reevaluate fabrication processes and expose their aesthetic propensities. A common singular and purely subtractive process is rethought as a multi-stage fabrication system through the rearrangement of existing steps, combining them with additive and multi-material-state methods. This new way of making requires the collaboration of multiple machines, allowing for more aesthetic opportunities of the process to be revealed along the way. Each stage has it’s own territory of resolution, which is highlighted or squashed in the interest of exploring it’s benefits to the overall form.
Resolving Resolutions involves a combination of stacking, adhesion, carving, and surface finishing. Blocks are stacked by one machine and adhered by another in the aim of approximating an overall form, allowing for latent pixellated qualities to exist throughout. Carving creates contrast between a much higher resolution of surface and the pixellated approximation, amplifying the formal aspects of both. Surface finishing increases resolution and readability by enhancing aspects of curvature, edge, and boundary, leaving elements of resolution from previous processes to converse with.
Nicholas Barger, Jack Gaumer, Brian Harms, Andrew Kragness
Machine Networks
instructors: Jonathan Proto & Brandon Kruysman
Sci-arc Spring 2013
Instructor Devyn Weiser
TA: Brian Harms, Nicholas Barger, Nazareth Ekmekjian
Pieces by Brian Harms
Photography by Devyn Weiser and Brian Harms
SCI-Arc, 2013
Description from Kruysman-Proto:
Conventional 20th century assembly logic was questioned in favor of polymer-based meta-assemblies produced through squishing, sedimenting, embedding, and inlaying. The focus was to create mysterious and alien assemblies which do not resemble known tectonic systems. Projects avoid all types of hardware, expression of technology (although they may in fact contain it), the dogmas of frames and panels, and other 20th century forms of reductive subdivision. Instead, the freeform and figural potentials of polymer and composite construction was exploited in search of new aesthetic and performative territories.
Underwriting this desire is the idea of multi-materiality, where the homogeneity of digital surfaces is replaced with complex depth, sectional, and compositional effects. The goal is to create building skins from a patchwork of materials and inlayed objects as heterogeneous as a calico cat or a Korean seafood pancake. Ingredients in the pancake include thermo-formable polymer sheet stock, as well as cast or squished-in liquid rubbers and resins, embedded semi-rigid 3D prints as structural core, and low-profile technology such as electroluminescent film. Multi-step tooling processes-- such as the use of loose ‘sub-tools’-- were used to create local delaminations and cavities between surfaces.
Critical for the ongoing research project of SQUISHED! has been the use of the SCI-Arc robots as tattoo artists. This has required developing a digital bridge between ZBrush, the entertainment industry sculpting and painting tool, and the hard backend of VAL3, the robot control language. The robots engrave, cut, mark, and deposit wet materials into, onto and between complex surfaces.
Project Credits: Alberto Alfonso, Brian Harms, Haejun Jung, Al Ataide, Cheng Gong
Instructors: Tom Wiscombe, Brandon Kruysman, Jonathan Proto
Institution: The Southern California Institute of Architecture (SCI-Arc)
[Videos 1 and 2]
Tomographic exercise using a large flat screen TV mounted to a robot which successively "scans" or slices through each frame of an animation. In this case the animation is a liquid simulation generated in Real Flow. The liquid simulation was chosen to make visible and accentuate the invisible bounding box of the TV moving through space.
[Videos 3 - 5]
Final videos of a long-exposure light animation technique. The technique involves creating several long exposure shots which represent a single frame of an animation. When the long exposures are compiled (several hundred of them) they create one seamless and complex animation using only 3 LED's (blue, red, yellow).
The process uses Grasshopper to generate a single toolpath, Processing to deal with the LED coordination, Esperant.0 to control the robot and cameras and sync the LED firing, and Kangaroo to provide the physics simulation.
***There is no post processing involved in any of these animations.
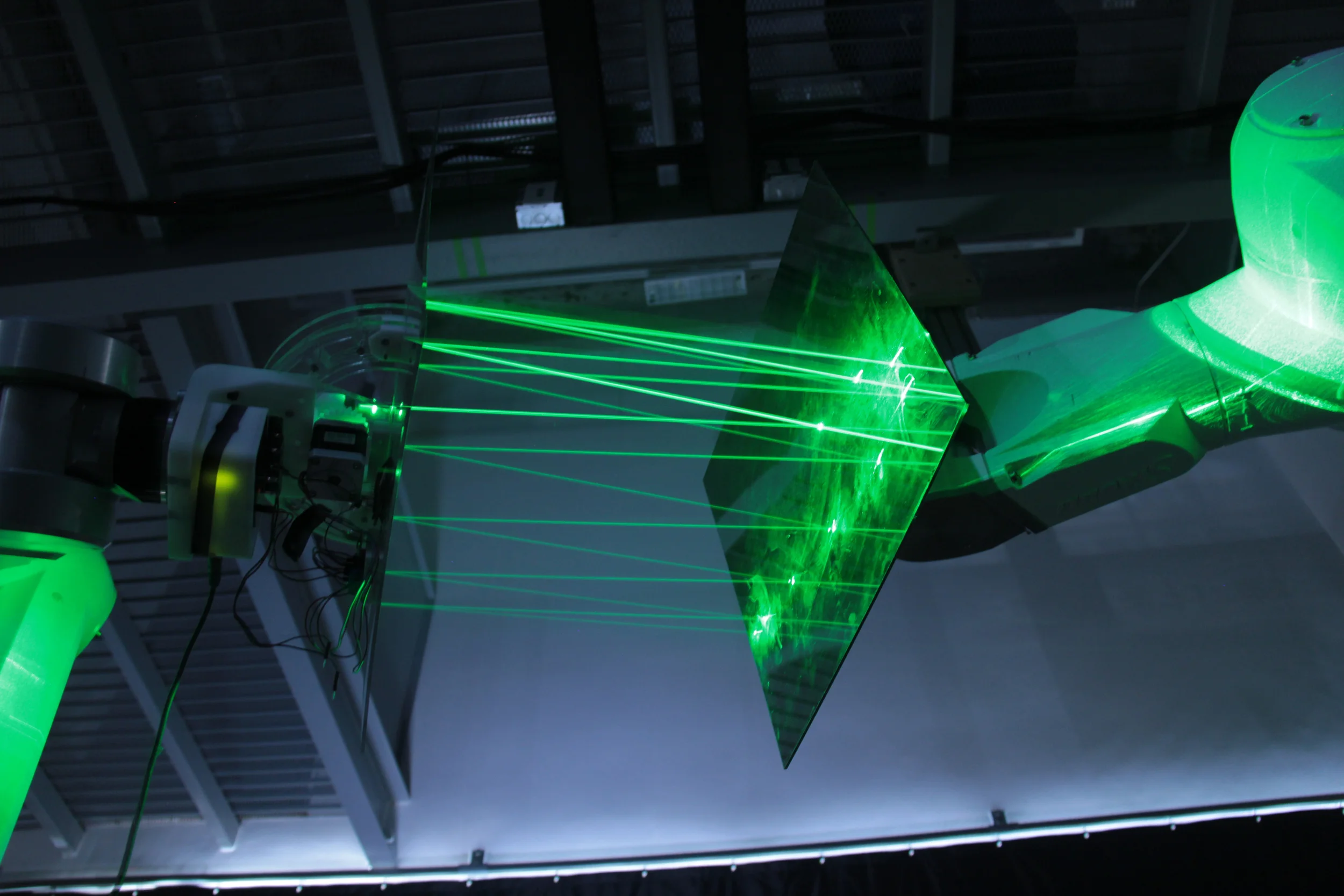
Real-time synchronized motion of multiple robots which bounce a continuous beam of light between themselves. A custom end arm tool was developed to control the angle of the laser pointer independently of the robotic motion (which is required for the continuous bouncing). The laser is mounted just behind the "source" mirror, which has a small hole lasercut for the laser beam to pass through.
SCI-Arc Fall 2012
Eye Robot Seminar Course
Instructor: Brandon Kruysman / Jonathan Proto
Project Leader: Brian Harms (nstrmnt.com)
Project Team: Haejun Jung / Vince Huang / Yuying Chen
The production hall of the factory is populated with reconfigurable “hives” – mini factories that can be adapted to meet the ever-changing needs of clients to manufacture anything from clothing to automobiles. Floor areas and shapes, ceiling heights, work station layouts, machine arrangements, and robot circulation paths are all changeable parameters of the system.
A group project involving the investigation of formal languages of various vehicular precedents. This is an ongoing project, and these are the images, videos, and simulations I’ve created.
The images below are renderings of a 3d model I made of Luigi Colani’s “Frog” (Motorcycle study of 1973). I created the 3d model in Maya from a profile view and then extracted primary edge curves to generate toolpaths for the robot simulations shown below. Those extracted curves also helped to generate the strips of light shown in the renderings.
We are currently conducting formal investigations to generate new forms to be fabricated. Then our task will be to develop a form of robotic fabrication that lends itself to the forms we have generated.
SCI-Arc Fall 2012
Testa Vertical ESTm Studio
Instructor: Peter Testa / Brandon Kruysman / Jonathan Proto
AT: Peter Vikar
Team: Brian Harms / Haejun Jung / Vince Huang / Yuying Chen
These flexible robotic manufacturing operatives (nicknamed A_FAB) are designed to monitor production hives [ see nstrmnt.com/#/hives/ ] and perform basic fabrication tasks such as 3D-printing or small scale CNC milling. Working collaboratively these robots can reconfigure elements of the factories they inhabit to better suit the needs of the current manufacturing operation.
The robot is comprised of 9 standard servo motors, and 7 Firgelli linear actuators (one is used to drive the plunger in the resevoir (syringe) to deposit material). The robot's locomotion is controlled by the animation of 12 motors using a servo controller. These motor sequences are called by and arduino which is getting live data from Firefly and Grasshopper. The toolpaths of the delta bot end effector are also generated directly from grasshopper based on user-defined geometry.
As 3D printing and robotic technologies advance, the issue of "bed size" of large-scale 3D printers will become moot, as 3D printers take the form of crawling, driving, or hovering fabrication machines that break the bounding-box model of rapid prototyping.
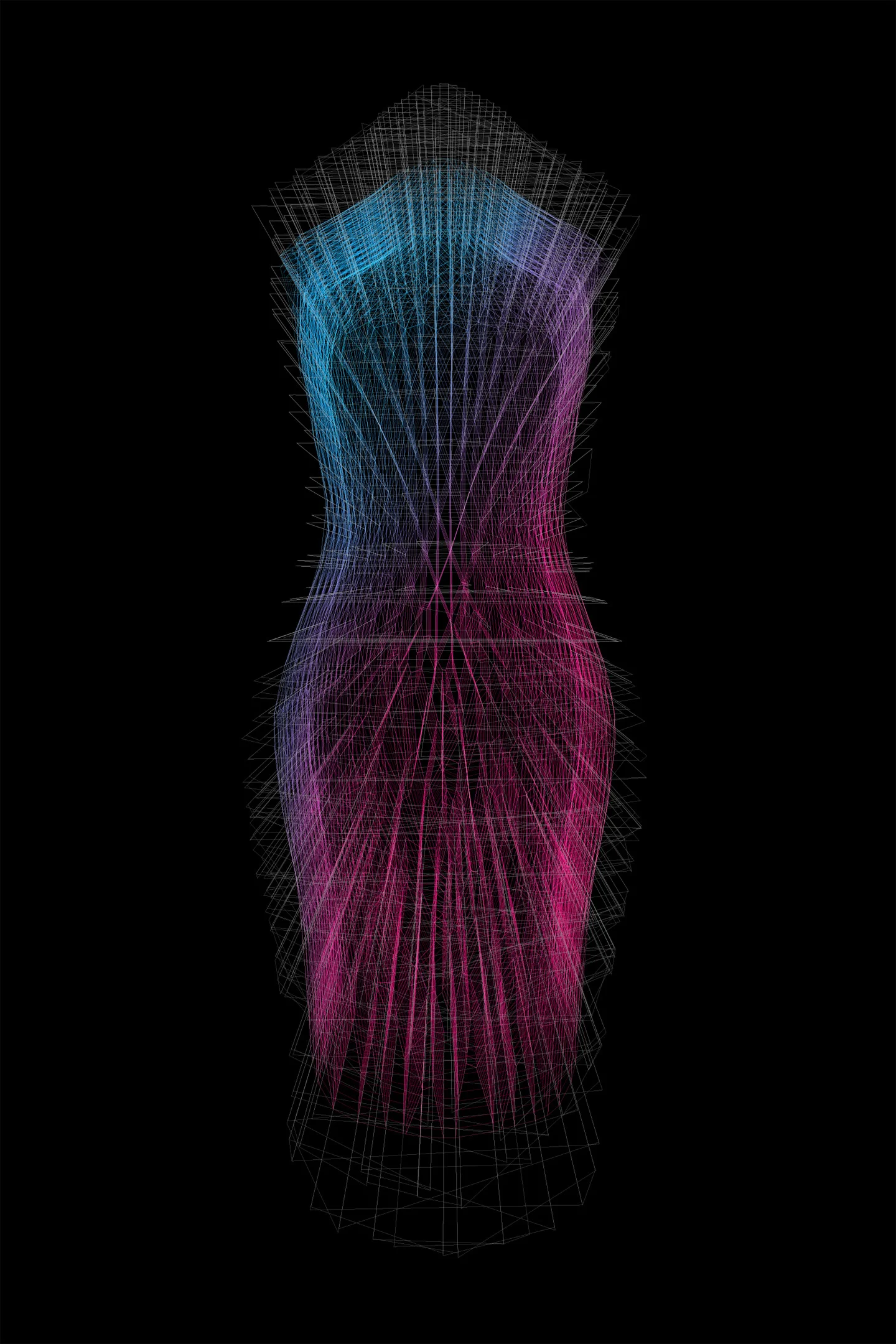
The V-Dress (or voronoi dress) is a fashion and fabrication experiment that deals with such issues as 3D scanning / imaging, variable corporeal exposure, digital fabrication and advanced robotics.
The idea was spawned from a previous project (Voronoi lamp) when two colleagues of mine (Duane McLemore and Katherine Voorhies, who are responsible for the 3D scan below) wanted to create a dress in the same vein as the lamp. To push the former project and process into a new realm, We began to experiment with other methods of fabrication that would differentiate this project in many ways.
The result is a provocative garment that takes advantage of complex six-axis cooperative robot milling paths to create molds unique to the user’s body in order to create a monocoque dress form (as opposed to the piecemeal construct of the previous voronoi project). The dress would create a gradient of exposure from fully covered, to partially unveiled, to fully revealed.
The goal of this project is to give the linear fluorescent lamp a more human feeling by enclosing the bulbs with an organic, sculptural diffusing element that is much more personal than the standard fixture.
The parametric aspect of this project allowed for quick analysis of a variety of design decisions. Using Grasshopper in conjunction with Rhino made it possible to make instant changes to the lamp at any time during the design process.
The Voronoi algorithm was used to create the lamp’s cell pattern. The pattern was then applied to a surface which was derived from diagrams of light waves. Grasshopper was used to parametrically scale and loft the cell pattern to create the 571 cells. A script was used to unroll and label each cell, then they were laser-cut and assembled.
This project was a non-academic design competition sponsored by Shift Boston, which called for the speculative design of any structure on the moon. The project was designed over a 2 month period with the collaboration of my colleague, Keith Bradley.
The design evolved out of the idea that the moon is not a site of extreme constraint but one of incredible opportunity. It was important to us to take advantage of the unique conditions not found here on Earth, rather than treat the design as something subservient to the technical obstacles the moon presents us with. The result is the Stadium for International Lunar Olympics (SILO), where structural spans, tower heights, and even sports are affected by the micro-gravity of the moon.
Our design was published in Scientific American, CNN, ArchDaily, and several European design magazines. Most recently our submission was featured in a French children’s science magazine.
Located at 1144 Marsh Street in San Luis Obispo, this building is a mixed-use urban infill project with two levels of underground parking, retail spaces on the ground level, and three floors of apartments. The apartment levels have floor to ceiling glazing for maximum natural daylight and are wrapped in a sculpted system of deep horizontal louvers. These louvers are pinched and separated in elevation to expose the storefront areas and provide privacy to the tenants, while diffusing direct sunlight.
The interior of the building is a void which serves as a circulation zone, a means to separate public and private areas, and a vehicle for bringing in natural light into the north facing apartments. The project involved the production of several study models to develop the louvers and void as an interior and exterior skin to the apartment levels.