





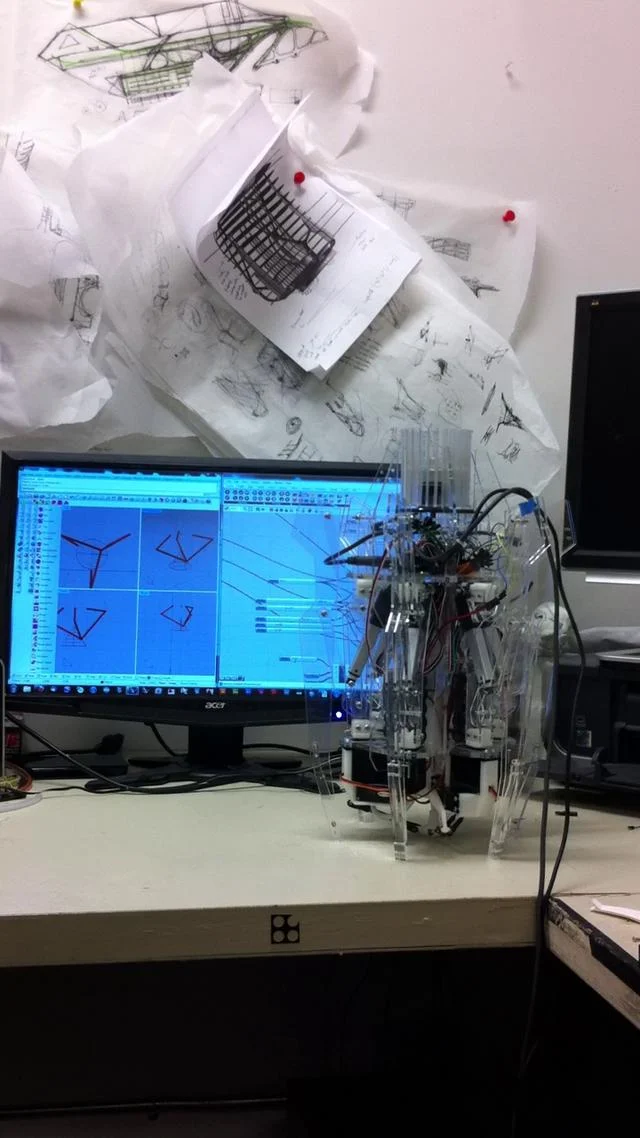
These flexible robotic manufacturing operatives (nicknamed A_FAB) are designed to monitor production hives [ see nstrmnt.com/#/hives/ ] and perform basic fabrication tasks such as 3D-printing or small scale CNC milling. Working collaboratively these robots can reconfigure elements of the factories they inhabit to better suit the needs of the current manufacturing operation.
The robot is comprised of 9 standard servo motors, and 7 Firgelli linear actuators (one is used to drive the plunger in the resevoir (syringe) to deposit material). The robot's locomotion is controlled by the animation of 12 motors using a servo controller. These motor sequences are called by and arduino which is getting live data from Firefly and Grasshopper. The toolpaths of the delta bot end effector are also generated directly from grasshopper based on user-defined geometry.
As 3D printing and robotic technologies advance, the issue of "bed size" of large-scale 3D printers will become moot, as 3D printers take the form of crawling, driving, or hovering fabrication machines that break the bounding-box model of rapid prototyping.