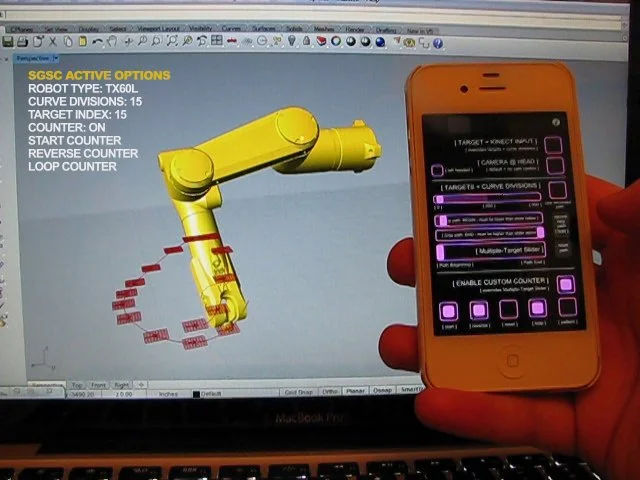

Custom interface for SGSC (now Crane) using Touch OSC to send wireless data to grasshopper, which also has the ability to read information from a Kinect sensor. The result is a hybrid interface where the user can control the location of the robot's end arm by waving his hand, articulate the angle of the robot's wrist with the gyroscope in the iPhone, and toggle any setting available in SGSC through the touch interface.